題庫堂
檢索
題庫堂
首頁
數學
英文學習
政治學
統計學
經濟學
藥理學
中醫藥物學
財政學
法學知識
公共行政
警察學
BI規劃師
財務管理
公共衛生學
工程經濟學
電力電子學
當前位置:
首頁
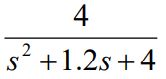
21.有一控制系統的閉迴路轉移函數為 ,則該系統的阻尼比(damping ratio)與自然無阻尼頻率(natural undamped frequency)ωn分別為何?(A) = 0.1,ωn
問題詳情
21.有一控制系統的閉迴路轉移函數為
,則該系統的阻尼比(damping ratio)
與自然無阻尼頻率(natural undamped frequency)ωn分別為何?
(A)
= 0.1,ωn= 4
(B)
= 0.3,ωn= 2
(C)
= 0.4,ωn= 4
(D)
= 0.6,ωn= 2
參考答案
答案:B
難度:
計算中
-1
書單:
沒有書單,新增
上一篇 :
20.在波德圖的增益曲線中,其每一個二階極點(pole)的轉折頻率之斜率變化量為何?(A) 20 dB/decade (B) 40 dB/decade (C) -20 dB/decade (D) -4
下一篇 :
22.某離散函數為g(k) = -5 k ,k ≥ 0,則g(k)的 z 轉換為何?(A) (B)(C) (D)
資訊推薦
23.已知狀態方程式為 ,其對應特徵值為何?(A) 2 與 3 (B) -2 與-3 (C) 3 與-2 (D) 2 與-3
24.有一控制系統的特性方程式為 s3 + 2s2 +(3+4K)s +(5-2K) =0 ,則能使該系統為穩定的K值最大範圍為何?(A) -0.1< K < 2.5(B)0 < K
25.彈簧-質量系統如【圖 25】所示,其轉移函數關係 為何? (A)(B) (C)(D)
26.考慮開迴路轉移函數為 ,其斜坡誤差常數(ramp-error constant)為何?(A) 0 (B) 1.2 (C) 2 (D) ∞
27.有關函數 的典型測試訊號之穩態誤差,下列敘述何者錯誤?(A)當輸入為步級函數(step function)1us (t) 時,穩態誤差為 0(B)當輸入為斜坡函數(ramp function)
28.考慮線性非時變系統,有關系統的可控制性與可觀測性 ,下列敘述何者錯誤?(A)可控制且可觀測支配最佳控制問題解的存在性(B)狀態可控制的充要條件為 的秩為n(C)狀態可觀測的充要條件為 的秩為
29.下列何者為線性系統?(A)(B)y(t)=u (t)+1 (C)y (t)= u (t)✖ u (t)(D) a (t)=23b (t)
30.一個拉氏函數為 ,反拉氏轉換後為下列何者?(A)t(B) t2 (C)(D)2t2
31.有關典型二階系統,下列敘述何者錯誤?(A)欠阻尼系統無峰值及無最大超越量(B)最大超越量與上升時間無法同時減小(C)系統存在的非線性元件通常會產生穩態誤差(D)阻尼比在 0.4 至 0.8 之間
32. ,下列何者不是它的特徵值(eigenvalue)?(A) -1 (B) -2 (C) -3 (D) -4
33.考慮加入 PD 控制器對系統的影響,下列敘述何者正確?(A)增加系統最大超越量 (B)增加上升時間和安定時間(C)增加頻寬 (D)有利抑制高頻雜訊
34.有關控制系統之時域性能響應,下列敘述何者錯誤?(A)穩態誤差與系統的型式(type)及輸入無關 (B)時間響應包含暫態響應與穩態響應(C)一階系統不會產生最大超越量 (D)暫態響應是物理系統的必
35.轉移函數為,其阻尼比為多少?(A) 0.1 (B) 0.5 (C)(D) 0.75
36.考慮控制系統的狀態轉移矩陣Φ(t)的性質,下列敘述何者錯誤? (A)Φ(t)定義為輸入及初始條件激勵產生之響應 (B)Φ(0) = I(單位矩陣)(C) Φ-1(t)= Φ(-t) (D)
37.有關回授控制器的設計,下列敘述何者錯誤?(A)系統的主極點應靠近虛軸(B)次要極點應往 s-左半平面且遠離主極點五倍距離以上(C)控制器極點應設計在 s-右半平面上(D)需要抑制高頻雜訊
38.下列何者非屬線性系統分析工具?(A)波德圖(Bode Plot) (B)相平面法(Phase Plane)(C)根軌跡圖(Root-Locus Plot) (D)奈氏圖(Nyquist Plot
39.有關穩定性理論,下列敘述何者錯誤?(A)羅斯-赫未茲(Routh-Hurwitz)穩定準則是線性系統之穩定性方法(B)李亞普諾夫(Lyapunov)穩定法則是一套線性與非線性系統之穩定性法則(C
40.齒輪列中,轉矩T1和T2,角位移θ1和 θ 2,齒輪的齒數N1和N2,以及齒輪的半徑 r 1和 r 2 之間的關係,下列敘述何者錯誤?(A)T1θ1=T2θ2 (B)T1N1=T2 N2 (
41.有關控制系統之時間延遲因素,下列敘述何者正確?(A)會影響開迴路轉移函數的大小 (B)會造成開迴路轉移函數的額外相位超前(C)會降低閉迴路轉移函數的額外相位界限 (D)會提升閉迴路系統性能且減少
42.開迴路轉移函數,其中z > p , K >0,請問根軌跡的形狀為何?(A)圓形 (B)十字型 (C)椭圓形 (D)心形
43.設計一個閉迴路控制系統共包含速度迴路、位置迴路、以及電流迴路,該系統由內層迴路至外層迴路依序為何?(A)速度迴路→位置迴路→電流迴路 (B)位置迴路→電流迴路→速度迴路(C)速度迴路→電流迴路→
44.考慮矩陣 ,其中 j= ,下列敘述何者錯誤?(A)行列式|A | =1(B)轉置矩陣 (C)共軛矩陣 (D)共軛轉置矩陣
45.考慮n ✖n 方矩陣A,已知有反矩陣 A-1,令λ和P為矩陣 A 之特徵值(eigenvalue)和特徵向量(eigenvector),下列敘述何者錯誤?(A)滿足AP= λP (B) A
46.有關根軌跡的靈敏度,下列敘述何者正確?(A)分離點時根靈敏度小易測(B)分離點時根靈敏度無限大(C)適宜在分離點操作K值(D)根參數靈敏度大者系統易穩定
47.有關梅生公式(Mason’s Law)【公式如右】,下列敘述何者錯誤?(A)n表示輸入與輸出間順向路徑的總數(B)Pi為第i個順向路徑的路徑總增益(C)△=1+(單獨迴路增益乘積的總和)-(所有